1 Active Vision/主动视觉
1-1 Variable Focus Lens/可变焦液体透镜
In order to change focus with traditional solid lenses, which have fixed optical properties, two or more lenses have to be jointly moved mechanically. In contrast, a variable focus lens can dynamically control its focal length by only using a single lens element. Liquid-filled variable focus lenses are based on the physical deformation of refractive surfaces, which changes their curvature.
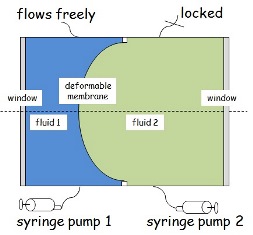
We proposed a novel variable focus lens with a large optical aperture. The lens consists of two chambers separated by a membrane. The chambers were infused with two different liquids characterized by their similar density but different refractive indices. Thus its deformation was in the interface between the two liquids, and it acted as a refractive surface due to the difference in refractive index of these liquids. If one fluid was made to flow into and out of its chamber, while the other was locked, the lens could shift its power dynamically by means of a syringe pump.
|
|
A cross-sectional view of the lens system. | A photograph of the lens prototype. |

Reference/ 参考
Zenghong Duan, Lihui Wang*, Zhi Li, Jian Fu, Susheng Fu, Boqian Chen, Yuxun Chen, and Yong Zhao, “Dynamic performance of a membrane-based variable focus lens with a large aperture,” Appl. Opt. 62, 4609-4617 (2023)[DOI:10.1364/AO.486278]
Lihui Wang, Hiromasa Oku, Masatoshi Ishikawa, Paraxial ray solution for liquid-filled variable focus lenses, Japanese Journal of Applied Physics, Volume 56, Number 12, 122501 (2017)[DOI:10.7567/JJAP.56.122501]
Lihui Wang, Hiromasa Oku, Masatoshi Ishikawa, An improved low-optical-power variable focus lens with a large aperture, Optics Express, Vol.22, Issue 16, pp. 19448-19456 (2014)[DOI:10.1364/OE.22.019448]
Lihui Wang, Hiromasa Oku, Masatoshi Ishikawa, Variable-focus lens with 30 mm optical aperture based on liquid-membranes-liquid structure, Applied Physics Letters, Vol.102, 131111 (2013)[DOI:10.1063/1.4800603]
1-2 Active Visual Tracking/主动视觉追踪
在追踪具有高度非线性轨迹的高速随机运动目标时,传统光电主动视觉系统存在目标丢失、视觉追踪失效的问题。课题组通过搭建了一套毫秒级光电主动视觉系统。采用光电云台结构、感兴趣区域提取、并行计算、高速运动目标追踪算法,实现响应时间≤2ms毫秒级的目标跟踪。
|
|
| 高速视觉追踪效果图. (a)目标从右至左运动过程; (b) 目标下落-碰撞地面-弹起的高动态过程。 | 视频. 基于毫秒级光电主动视觉系统的高动态目标追踪实验 |

Reference/参考
Jiaqi Li, Lin Li, Lihui Wang*, Lei LI, Shaoyong Li, and Masatoshi Ishikawa, Adaptive milliseconds tracking and zooming optics based on a high-speed gaze controller and liquid lenses, Optics Express, Vol.32, Issue 2, pp. 2257-2270 (2024) [DOI:10.1364/OE.512003]
Ruimin Cao, Jian Fu, Hui Yang, Lihui Wang*, and Masatoshi Ishikawa, “Robust optical axis control of monocular active gazing based on pan-tilt mirrors for high dynamic targets,” Optics Express 29, 40214-40230 (2021) [DOI: 10.1364/OE.439083]
3 High-Speed 3D & Depth Imaging/成像
A large open aperture in an optical system can capture high-resolution images but yields a shallow depth of field. In order to keep the high-resolution and enlarge the DOF at the same time, back-and-forth movement of the lens should be driven by the rack and pinion motion of a motor.
However, continual forward and reverse rotation is a high-power-consumption task, because positive and negative current are used alternately to control the motor, which quickly triggers a safety stop to prevent overheating. Moreover, it is quite difficult to achieve high-speed responses in such conditions.
|
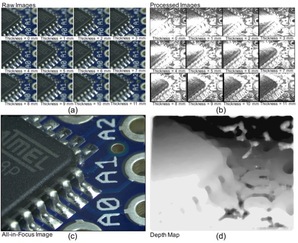
Images obtained by changing the plate thickness from 0 mm to 11 mm. (a) Raw image sequence. (b) Images obtained after rescaling, phase correction, and Laplacian edge detection. (c) All-in-focus sharp image generated by merging the in-focus pixels. (d) Depth map produced by using the index numbers of the images, which contained depth information. |
Reference/参考
Huayu Cheng, Lihui Wang*, Yuan He, , High-speed all-in-focus 3D imaging technology based on the liquid lens focus scanning, SPIE/COS Photonics Asia (Beijing, 2023.10.16) / (Oral 12767-11) doi: https://doi.org/10.1117/12.2686779
Lihui Wang, Jianjiang Cui, Satoshi Tabata, Masatoshi Ishikawa, Low-cost, readily available 3D microscopy imaging system with variable focus spinner, Optics Express, Vol.26, Issue 23, pp. 30576-30587 (2018).[DOI:10.1364/OE.26.030576]
4 High-Speed 3D Projection Mapping/显示
Projection mapping (PM) is attractive as a fundamental technology for the advancement of various subjects, such as media art, entertainment, and augmented reality. However, conventional projectors have a shallow depth of field (DOF); therefore, sharp images are only visible in the limited depth range. In the case of dynamic projection mapping (DPM), which can project images on the surface of the moving objects, the shallow DOF limits the permissible motion of the object, because the projected images become blurred when the object is outside the DOF.
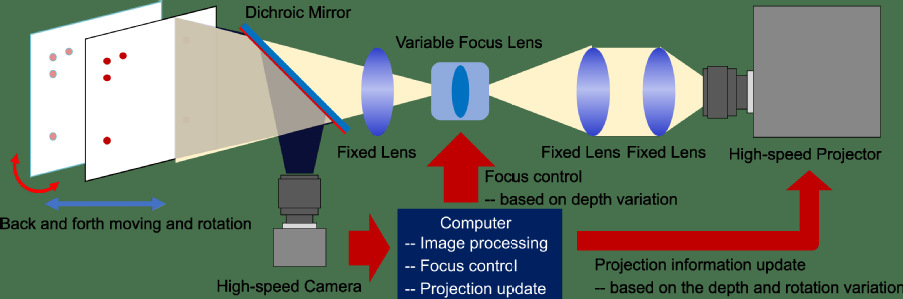
Our laboratories have developed a high-speed focal tracking projection system, which includes the technologies of high-speed vision, high-speed projector, and high-speed variable focus optics. In this system, the variation of the object’s distance and posture was captured using the high-speed vision technology that served as immediate feedback to the liquid lens and high-speed projector. As a result, the focal distance is compensated, and the projected images are updated in real-time to fit the moving object. Therefore, a well-focused image projection was achieved even when the motion involved large depth range movement.
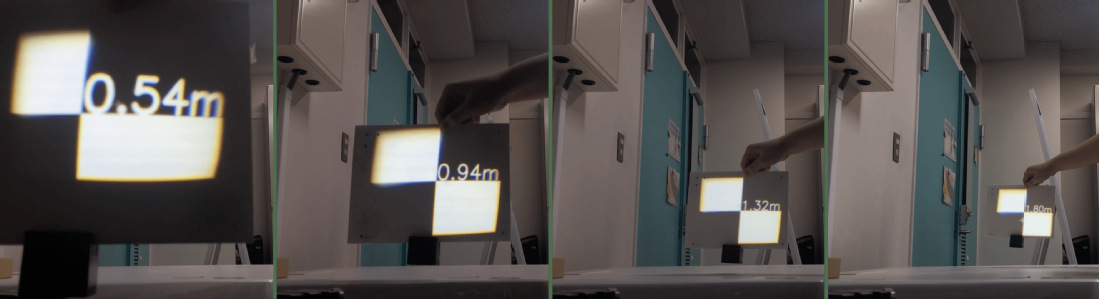
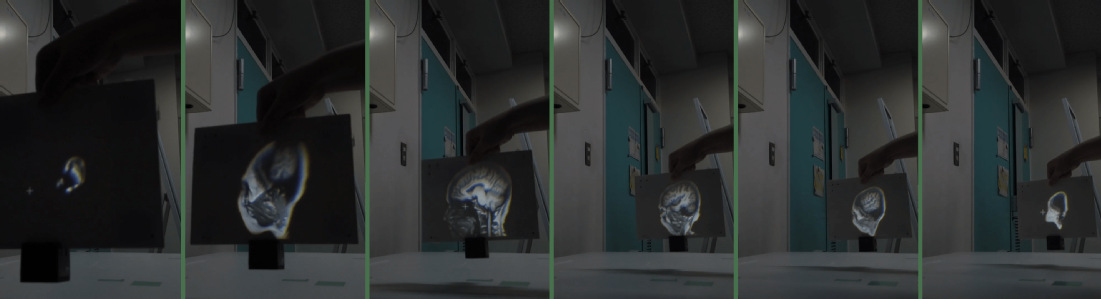
This system could ensure that the projected images were sharp and clear at variable distances, while the object was moving dynamically in a large three-dimensional area. Hence, this approach can be effectively applied to applications such as Volume Slicing Display. Furthermore, it can turn any physical surface into an interactive display, and enable the manipulation of their appearance to provide detailed information. Our system provides the essential technology for expanding such applications.
|
|
| Prototype of projection tracking system using a liquid lens. (Ver.7) (2018-) | Prototype of projection tracking system using a liquid lens. (Ver.2) (2019-) |

|
| System configuration. |
|
| In-focus projection in the large depth range. |
|
| Volume Slicing Display: change images based on the distance. |
The following three awards were given to the project “High-speed focal tracking projection system based on liquid lens”.
ACM SIGGRAPH Special Prize, (Association for Computing Machinery)
Innovative Technologies 2019, (Digital Content Association of Japan)
Innovative Technologies 2019, Sponsor Award (CGWORLD) 2019, (Digital Content Association of Japan)
Reference/ 参考
Lihui Wang*, Satoshi Tabata, Hongjin Xu, Yunpu Hu, Yoshihiro Watanabe, and Masatoshi Ishikawa, Dynamic depth-of-field projection mapping method based on a variable focus lens and visual feedback, Optics Express, 31(3), pp. 3945-3953 (2023) [DOI:10.1364/OE.478416]
Lihui Wang, Hongjin Xu, Satoshi Tabata, Yunpu Hu, Yoshihiro Watanabe, and Masatoshi Ishikawa: High-Speed Focal Tracking Projection Based on Liquid Lens, ACM SIGGRAPH 2020 Emerging Technologies (SIGGRAPH ’20) (Virtual Event, USA, 2020.8.24-28) [DOI: 10.1145/3388534.3408333]
Lihui Wang, Hongjin Xu, Yunpu Hu, Satoshi Tabata, Masatoshi Ishikawa, Dynamic Depth-of-Field Projection for 3D Projection Mapping, ACM CHI Conference on Human Factors in Computing Systems (CHI’19) (Glasgow, Scotland, UK. 2019.05.05-09) [DOI: 10.1145/3290607.3313246]
Lihui Wang, Yunpu Hu, Hongjin Xu, Masatoshi Ishikawa, Dynamic focal tracker display, SPIE Photonics West 2019 (San Francisco, California, USA. 2019.02.07)/ (Oral Session) [DOI: 10.1117/12.2506958]
5 3D Augmented Reality Head-Up-Display / 三维增强现实车载抬头显示器
Head-Up-Display (HUD) enables a driver to view information with his head positioned “up” and looking forward, instead of angled down looking at lower instruments. By adding the Augmented Reality technology, targets, like people and cars, can be marked to alarm to the drivers to avoid the potential accidents.
Traditional 2D AR HUD projects information messages at a certain distance away from the driver. It asks a driver to observe the projection along the optical axis at a certain point. When the driver moves his head, a miss-matching projection occurs between the projected data and the target in the real world.
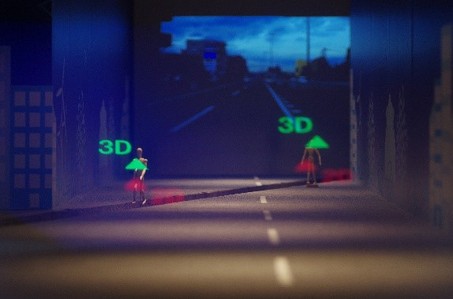
In this 3D AR HUD technology, a 3D virtual display can be projected in front of the driver. AR messages will be dynamically projected according to the 3D locations of the targets. In our 3D HUD, a virtual display is projected into a three-dimensional world, so there will be no mismatch when the driver moves.
The following demos were recorded by two cameras, which were placed at different places. When the camera was placed along the optical axis, 2D and 3D markers were all perfectly matched. When the camera was placed at an angle to the optical axis, a mismatch was found in 2D HUD, but 3D HUD was still well matched.
This work was conducted by a collaborate research project with Ishikawa Laboratory and Konica Minolta Inc..
|
|
|
| A photo of 2D HUD projection. All the 2D HUD markers were projected at a certain distance. | A photo of 3D HUD projection. 3D HUD markers were projected at different distance. This photo were token when it focused at close. | A photo of 3D HUD projection. 3D HUD markers were projected at different distance. This photo were token when it focused at far. |


6 Smart Actuator and sensor/软体驱动器和传感器
触觉感知和交互作为人-机交互的主要方式之一,其通常需要人工设备具备良好的触觉感知能力。为丰富人工设备所能感知的触觉信息,基于混合感知机理的触觉传感器近年来受到了广泛关注。然而,对于可穿戴或柔性人工设备而言,开发具有简单结构、易制备、成本低、功耗低、易于维护和集成的触觉传感器仍然是一项艰巨挑战。
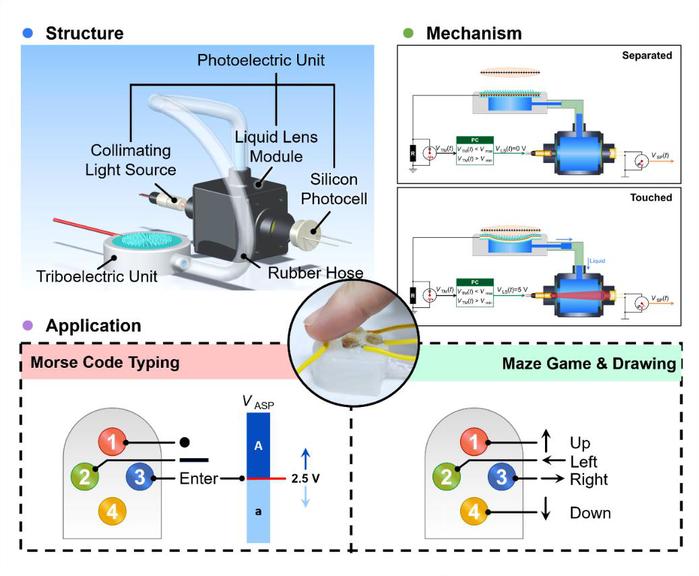
在此背景下研究团队提出了一种新型的摩擦电-光电混合触觉传感器,其采用模块化分体式结构,包括两个单元:基于单电极摩擦电纳米发电机设计的摩擦电单元,用于接收外部触觉刺激;以及基于可变焦液体透镜结构的光电单元,用于将触觉刺激转化为光电信号。两个单元均采用单腔体结构,可轻松实现对单元零部件的拆卸与更换。此外,摩擦电单元可根据其输出信号控制光电单元内部所嵌光源的开/关行为,从而降低传感单元功耗,提高触觉响应速度。光电单元具有优越的电磁干扰抗性,使得传感器能够准确、定量地感知接触力。通过开展感知性能测试实验,表现出响应时间短(~9 ms)、输出线性度高(R2≈0.9952)、耐久性和稳定性好等特点。基于上述特点,通过进一步设计-开展文字键入、图形绘制、音乐演奏等触觉交互实验,展示了本传感器在触觉交互任务中的实用性,进而说明其在人-机交互设备领域中具有广阔的应用前景。
|
| 如图,(左上)摩擦电-光电混合触觉传感器结构图,(右上)传感器得动作机理,(左下、右下)面向摩斯电码、迷宫游戏和绘图操作功能,传感器按钮的人机交互配置方案。 |
Reference/参考
Hui Yang, Tianzhao Bu*, Wenbo Liu, Jiaqi Liu, Yunzhi Ling, Meixia Wu, Weirui Liu, Changan Wang*, Xifeng Gao*, Lihui Wang*, A novel triboelectric-optical hybrid tactile sensor for human-machine tactile interaction, Nano Energy, 125, pp. 109592 (2024) [DOI:10.1016/j.nanoen.2024.109592] (IF=17.6)
Ronghua Hu, Hui Yang, Lihui Wang*, and Longfei Fan, Flexible optical tactile sensor based on a liquid-membrane lens structure, Applied Optics, 62(26), 6952-6960 (2023) [DOI:10.1364/AO.496741](IF=1.905)
Hui Yang, Jiaqi Liu, Wenbo Liu, Weirui Liu, Zilong Deng, Yunzhi Ling, Changan Wang, Meixia Wu, Lihui Wang*, and Li Wen*, Compliant Grasping Control for a Tactile Self-Sensing Soft Gripper, Soft Robotics, (2023) [DOI:10.1089/soro.2022.0221] (IF=7.784)