 |
|
|
|
1011 访问 |
相关教师 |
范新建,苏州大学特聘教授,博导,国家高层次青年人才,主要从事微纳机器人技术的研究,在该类机器人跨尺度驱动与导航控制、集群多模态调控取得显著性进展,研究成果在靶向给药领域有重要应用潜力。在本领域的权威期刊发表论文30余篇,累计IF > 180,H因子16。第一/通讯作者20余篇,包括Science Robotics、Science Advances、PNAS、Advanced Functional Materials、ACS Nano等微纳机器人领域顶级期刊。第一/通讯作者论文SCI他引1600余次,研究成果受到新华社、新华日报、New Scientist、Science X等国内外主流媒体广泛报道。
获得哈尔滨工业大学“研究生十佳英才”称号、“国家博士后创新人才”支持计划、MINE优秀青年科学家等。在苏州大学入职后,依托江苏省先进机器人技术重点实验室,开辟了多尺度智能磁控微型机器人研究的新方向,目前主持包括国家优秀青年科学基金、国家自然科学青年基金、重点研发计划子课题、青年科学家分课题等在内的多项国家级和省部级项目。
范新建,苏州大学特聘教授,博导,国家高层次青年人才,主要从事微纳机器人技术的研究,在该类机器人跨尺度驱动与导航控制、集群多模态调控取得显著性进展,研究成果在靶向给药领域有重要应用潜力。在本领域的权威期刊发表论文30余篇,累计IF > 180,H因子16。第一/通讯作者20余篇,包括Science Robotics、Science Advances、PNAS、Advanced Functional Materials、ACS Nano等微纳机器人领域顶级期刊。第一/通讯作者论文SCI他引1600余次,研究成果受到新华社、新华日报、New Scientist、Science X等国内外主流媒体广泛报道。
获得哈尔滨工业大学“研究生十佳英才”称号、“国家博士后创新人才”支持计划、MINE优秀青年科学家等。在苏州大学入职后,依托江苏省先进机器人技术重点实验室,开辟了多尺度智能磁控微型机器人研究的新方向,目前主持包括国家优秀青年科学基金、国家自然科学青年基金、重点研发计划子课题、青年科学家分课题等在内的多项国家级和省部级项目。
1. Ferrofluid droplets as liquid microrobots with multiple deformability
由于在微米尺度上缺乏足够柔软的材料,具有多种变形能力的微型机器人的开发变得极具挑战性。在这项研究中,我们旨在证明由磁流体液滴组成的液体微型机器人具有可控、多变的变形能力,并且可以通过编程对其进行单独或编队控制。例如,液体微型机器人单体(LRM)可以通过自身变形穿过狭窄的通道,也可以通过特有的分裂和融合能力实现体积的缩放;多个液体微型机器人可以重组为各种功能性的液体机器人编队(LRA),例如微形棒状编队,微型火车状编队,微型皮艇状编队和微型滚针状编队。复杂的形态变化使得液体微型机器人编队可以响应多种地形表面或执行各种复杂的任务。此外,我们基于多物理场融合的理论模型重现了多个LRM系统的动态自组装和组行为,这有助于研究这些物理现象背后的机制。总之,本文提出的磁流体液滴机器人为某些潜在生物应用,例如活体内远程微操纵和药物靶向运输等,提供了新颖的解决方案。
2. Reconfigurable magnetic microrobot swarm multimode transformation locomotion andmanipulation
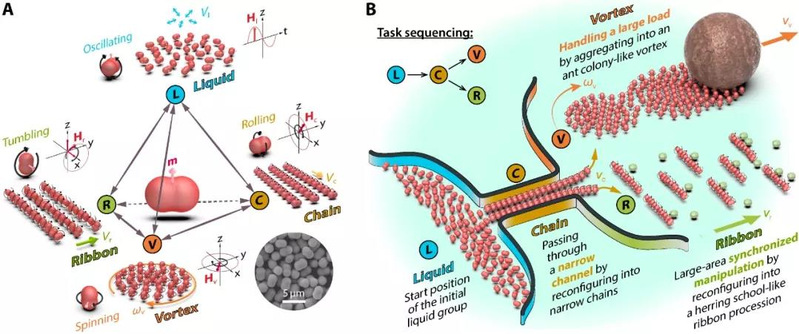
由外部磁场驱动的微机器人可以表现出一系列迷人的聚集行为,例如,微机器人的动态的自组织行为、微机器人群的整体运动;然而,在一个系统内实现微机器人的多种群体运动模式自由切换,以模仿自然界中存在的高环境适应性和高效率的群体行为极具挑战。在本工作中,我们提出了一种微机器人群体的控制策略,通过编程利用交变磁场可以将微机器人群体的运动模态转换为液态,链状,涡旋和带状的群组,并在它们之间实现快速和可逆的转换。更有意义的是不同的运动模态具有迥异的特性:如,链状群组的特点是可以轻松通过狭窄通道,带状群组能够对多个目标进行同步操作,而漩涡状群组可以实现微机器人的富集,并协调处理较重的负荷。与此同时各种群体模式可以通过编程实现在任何方向上运动,并且具有出色的机动性。这种可按需调控的微机器人群通过提供多种群体运动模式,可以满足环境变化或多任务处理要求;不仅可以作为研究生命系统基本原理的重要手段,而且可以作为生物医学的研究的重要载体。
3.Programmable Generation and Motion Control of a Snake-Like Magnetic Microrobot Swarm
本文提出了一种可通过编程生成并进行运动控制的蛇形磁控微纳游动机器人群(SMS)。SMS由旋转磁场驱动的花生状赤铁矿胶体颗粒(长度:~3μm,直径:~1.5μm)组装而成。SMS为时刻保持动态平衡的链状结构,可以捕获周围的单个微纳游动机器人实现长度的增长。本工作分析和模拟了SMS的生成和微纳游动机器人群体运动机制,并通过对磁吸引力,流体动力学相互作用和粘性阻力的研究,提出了数值模型来估计各个微纳游动机器人之间的相互作用力。在微观视觉控制系统导航下,使用遗传算法增强蛇形群体结构的高效生成,并使用Meanshift算法实现具有良好鲁棒性的目标跟踪定位方法。此外,文中还证实了SMS的可逆组装和拆卸能力。通过调节输入磁场的旋转频率,强度和转向角,SMS能够在简单和复杂的环境中实现高精度的轨迹跟踪和自主导航运动。
4.Automated Noncontact Micromanipulation Using Magnetic Microrobots
该工作利用微纳游动机器人实现了通过微流体进行微粒捕获和操作的法,该方法使用直径约0.8μm,长度为3μm的花生状磁力驱动微纳游动机器人,并开发了基于旋转磁场的控制系统,此系统可以实现微纳游动机器人的两种运动模式:滚动模式和皮划艇模式。在滚动模式下,微纳游动机器人周围会产生强烈的涡流,此微流可以使得微纳游动机器人操控体积比其大数百倍的微粒。在皮划艇模式下只会产生较弱的捕获力,因此皮划艇模式可应用于微粒的释放操作。本文还提出了一种基于视觉和行为反馈的控制器,通过迭代校正新出现的操纵行为,提高复杂轨迹跟踪和复杂环境中微纳游动机器人对微粒的操控。实验结果证明了微纳游动机器人可以沿着任意自定义的轨迹运动并捕获和运输直径达15μm的微粒的能力。
5.Magnetically Actuated Peanut Colloid Motors for Cell Manipulation and Patterning
该工作提出了一种磁力驱动的花生状赤铁矿胶体马达,它不仅可以在流体中以滚动或摆动模式运动,而且可以以非接触方式执行单细胞操作并且实现将多个细胞摆成固定图案。当处于滚动模式时,花生状微马达在130Hz/6.3mT的旋转磁场下可以达到10.6μm/s的运动速度,并且可以实现在预定轨道中进行精确可控的循迹运动。当处于摆动模式时,微马达在80 Hz/6.3 mT的锥形旋转磁场下的运动速度可达14.5μm/s,并且由于此模式下微马达可以爬过陡坡,因此更适用于复杂的环境的运动控制。微马达周围流体的模拟结果表明,两种运动模式之间的差异主要来自于马达附近流场分布的不同。通过建立滚动和摆动模式的切换策略,这些花生状微马达可以利用微流体将细胞运输和释放到预定位置,进而将多个细胞摆成复杂的图案。本文所研究的磁驱动花生状胶体马达提供了一种对生物对象,如细胞、微组织友好的微操作技术,可用于细胞的操作和图案化,细胞测量和微组织内物质交换研究。
6.Multi-functional Ferrofluid Droplet Robots by Programming Nonuniform Magnetic Fields
磁性微型软体机器人具有多模态运动和先进的操作能力,在芯片实验室和生物医学领域具有广泛的应用前景。然而,这些软磁机器人的功能通常受到预先设计的几何结构的限制,无法在现场重新配置。此外,它们的变形能力尚属于小应变范围,限制了其在受限环境中的应用,例如,无法实现在比机器人本身小得多的狭窄空间中导航。本文提出了一种利用外部非均匀磁场来驱动和控制磁流体液滴的方法,与现有的软机器人相比,该方法具有更大的变形和更多的可重构功能。通过控制非均匀的外部磁场,液滴机器人可以具有可重构的复杂形态,如可控的分裂和合并、穿过比其尺寸小得多的窄通道、新配置成不同的形状以完成多种操作任务。此外,在分裂成多个液滴后,还可以通过协调它们的运动来实现协同运作的功能。与传统的软磁机器人相比,液滴机器人的可控大变形可以在芯片实验室和生物医学工程中得到前所未有的应用。
7.Broad modulus range nanomechanical mapping by magnetic drive soft probes
本文提出了磁驱峰值力调制原子力显微镜纳米力学成像新方法,并以此自主研发了新型成像系统。该方法将单探针的模量测量范围拓宽到4个数量级以上,高出现有同类方法2个数量级,解决了多组分、大模量跨度复合材料的纳米力学特性扫描成像的难题;首次实现了目前商用最软探针(6 pN/nm)在液体环境中的峰值力调制,解决了液体环境中极软材料纳米力学特性扫描成像的难题。成果为多环境下纳米材料、生物材料、尤其是多组分材料的纳米力学测量成像提供了方法、技术与系统支撑,该方法对于分析在复杂环境中具有大弹性模量变化的异质样品具有重要的意义。
博士后 (讲师): 诚邀机械、控制、计算机、材料等多学科的博士加盟,待遇丰厚。(长期有效)
研究生: 每年招收博士生 1 名、硕士生 > 2 名;研究方向:面向药物递送、生物操作及微纳制造的微纳机器人技术,欢迎报考!(长期有效)
招生信息1: